UG10.0運動仿真中簡單的兩垂直方向(X-Y向位移)仿真。第一次寫經驗,在網上找了很多這方面的方法,沒有一個說清楚的,摸索之后的經驗與諸位分享,希望有所幫助
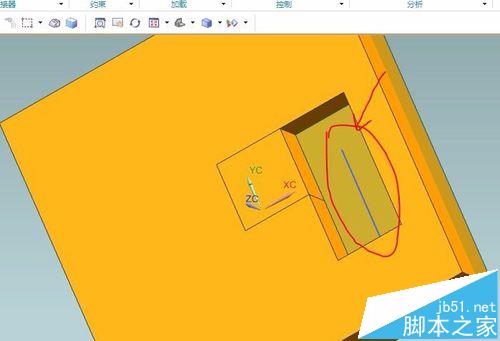
1、首先建立簡單模型。在這里畫了一個大基座,一個方塊,和一條直線。此直線將作為嚙合連桿(裝配過程不需要任何約束)
2、環境設置為如下圖

3、設置3個連桿,此處連桿1為大基座且為 固定連桿;連桿2為方塊;連桿3為直線。三者均不用設置質量等
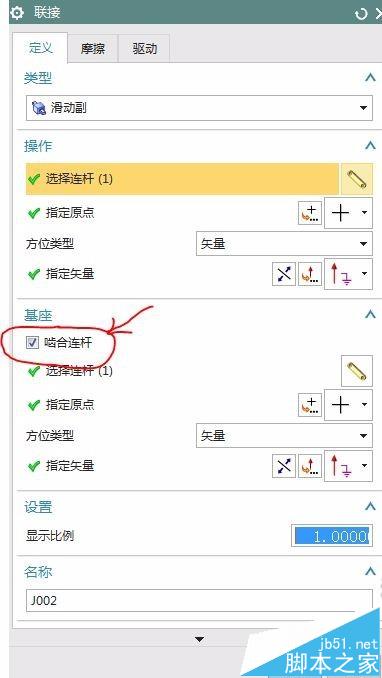
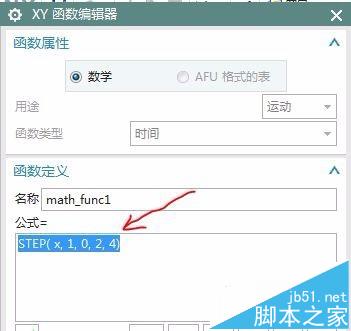
4、運動副J001在創建基座為固定連桿后就會自動生成無需設置。設置運動副J002為滑動副,操作連桿為方塊,基座勾選嚙合連桿為直線,二者原點和矢量方向一致。然后設置驅動,此處驅動設置為step函數(根據本運動仿真)

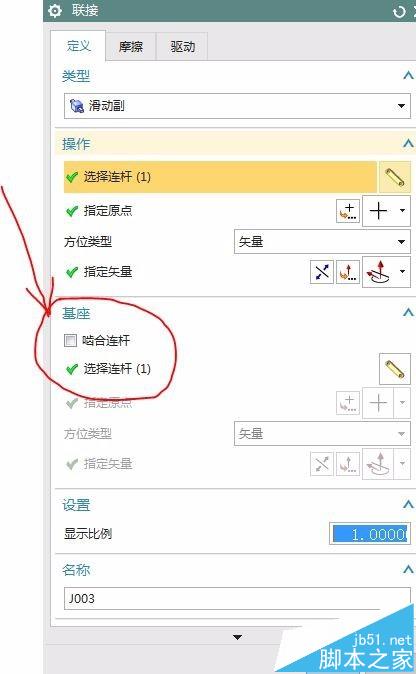
5、設置運動副J003為滑動副,此時操作連桿為直線,原點為上端點,矢量沿直線向下。基座連桿此時不勾選嚙合連桿,選大基座。設置驅動,此處驅動設置為step函數(根據本運動仿真)
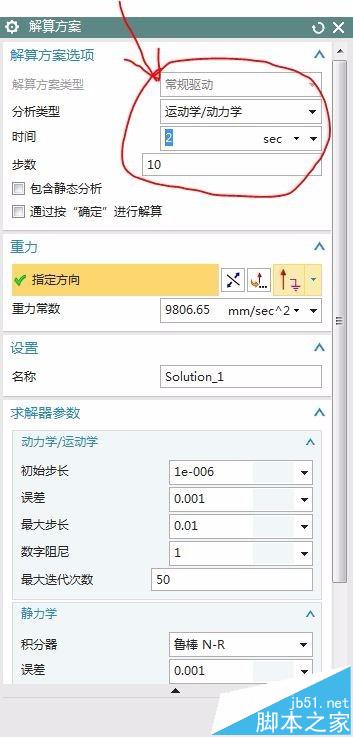
6、最后設置結算方案,根據本運動仿真時間為2s,步數不需要太多。確定后求解,觀看動畫即可看到方塊沿垂直槽進行運動
注意事項:
至于嚙合連桿與前面的操作連桿是否一定要同原點同矢量還未來得及驗證。
相關推薦:
UG NX怎么畫漸開線?
UG工程圖怎么轉換成CAD格式并修改線型?
UG怎么裝配零件? ug轉配添加組件的教程
新聞熱點






疑難解答