maya綁定是經常使用的,該怎么實現腳部綁定反向動力學呢?下面我們就來看看詳細的教程。
1、IK就是我們所說的“反向動力學工具”;
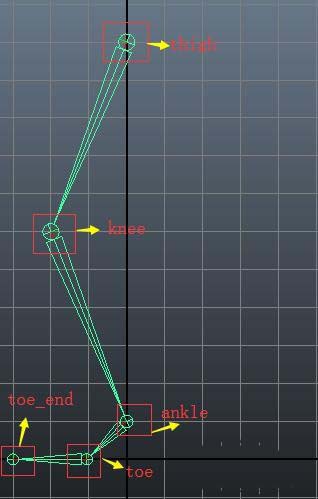
2、創建一節腿部骨骼,命名;
3、創建IK;
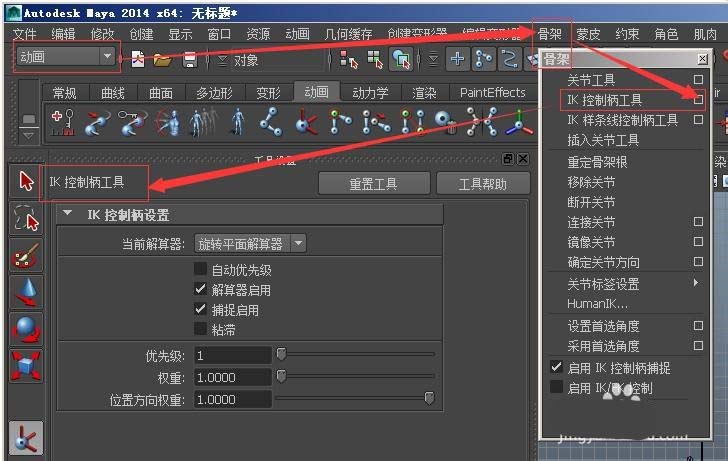
《1》在“動畫”模塊的“骨架”,點擊“IK控制柄工具”的方框,打開Ik的工具設置;
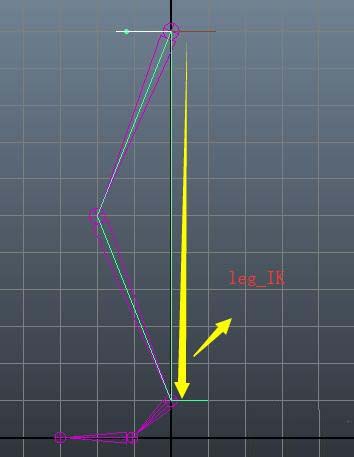
《2》點擊骨骼thigh+骨骼ankle,創建腿部IK;
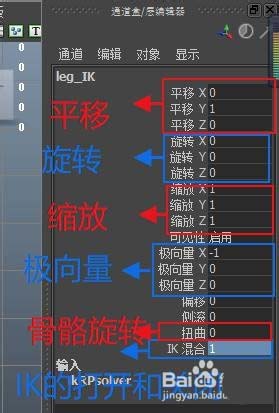
4、IK通道盒的基本屬性;
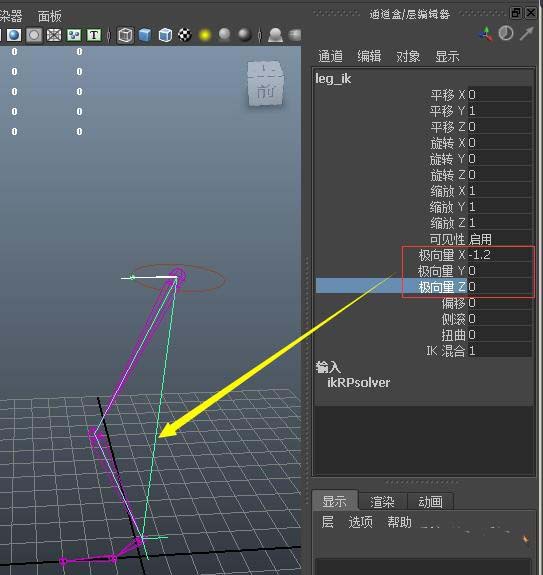
《1》極向量:
(1)極向量屬性可以控制骨骼轉動的方向;
(2)按“T”鍵+鼠標左鍵可以手動調整IK的極向量;
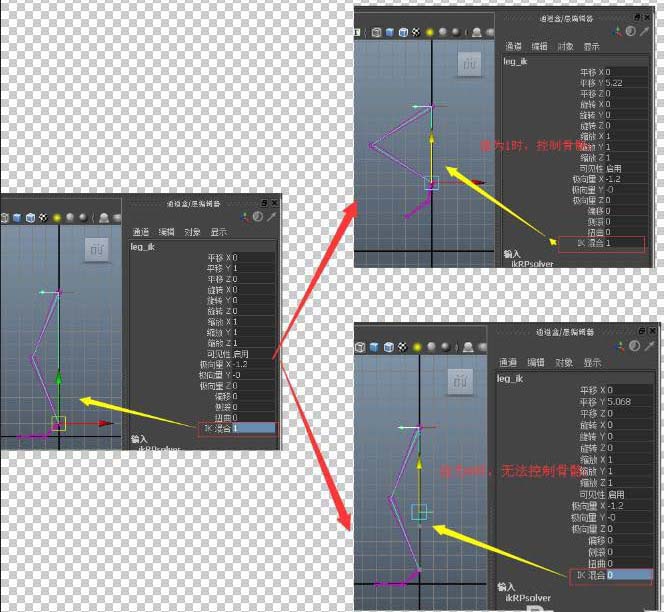
《2》IK的ik blend(IK混合)屬性:值為1時,可以控制骨骼;
值為0時,無法控制骨骼;
5、IK的創建屬性;
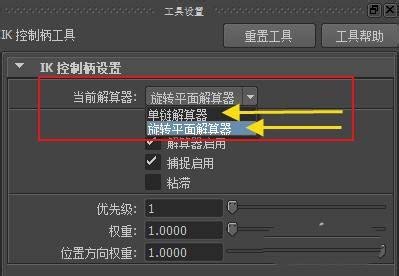
《1》IK有兩種解算器:
(1)單鏈解算器(ikSCsolve):極向量不可調整;
(2)旋轉解算器(ikRPsolve):極向量可以調整;
《2》一般創建IK的時候只切換解算器,其他的不動;
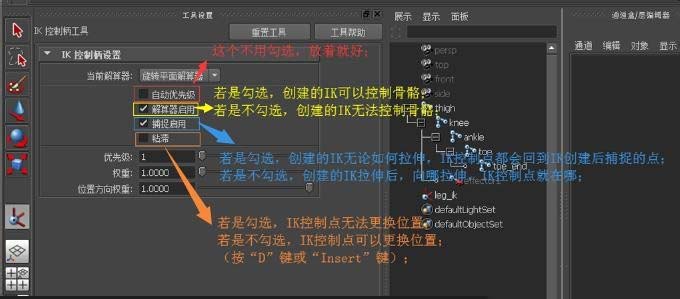
《3》創建IK還有4個選項;

6、IK和FK的區別:
(1)IK:IK是反向動力學,可以用子級物體控制父級物體(如提線木偶的運動方式);
(2)FK:FK是正向動力學(如芭比娃娃的運動方式);
以上就是maya腿部反向動力學綁定技巧 ,希望大家喜歡,請繼續關注武林網。
相關推薦:
maya特殊復制怎么制作花瓣陣列效果?
MAYA制作三維動畫怎么對臺燈模型進行綁定?
maya模型怎么綁定骨骼? maya骨骼綁定教程
新聞熱點





疑難解答