棘輪機構是搖桿的連續往復擺動轉換成棘輪的單向間歇運動的機構。這里分享一種省略了搖桿的solidworks棘輪棘爪運動仿真的方法,仿真時用馬達帶動棘輪單向連續轉動代替了搖桿帶動棘輪單向間歇運動。
一、進行裝配
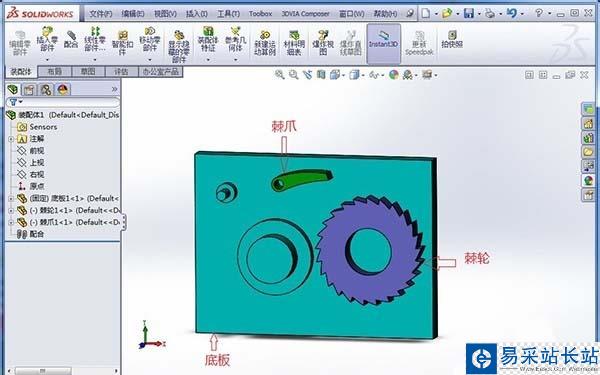
1、零件準備,如下圖所示,主要有底板、棘輪和棘爪,底板用于確定棘輪和棘爪的相對位置。
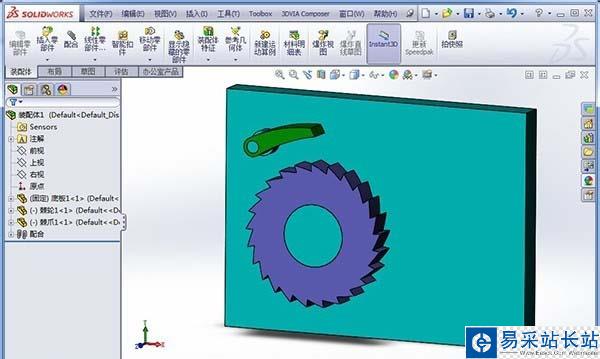
2、將底板作為固定件,把棘輪和棘爪分別安裝在底板的相應位置,同時保持二者的旋轉自由度。裝配效果如下圖所示:
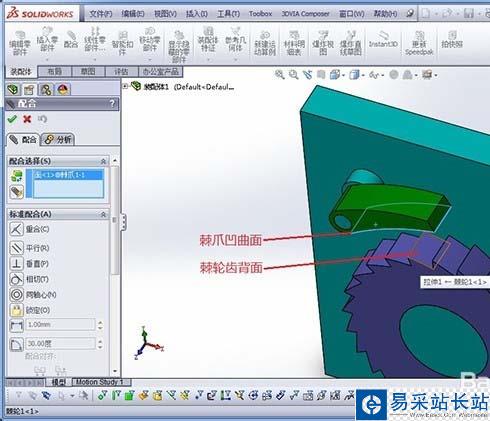
3、如下圖所示,選擇棘爪凹曲面和棘輪齒背面作為要配合的實體,系統自動將二者的配合關系選擇為“同心”。這一步保證棘輪棘爪之間有個合適的初始相對位置。此時所有零件都處于完全定位狀態。
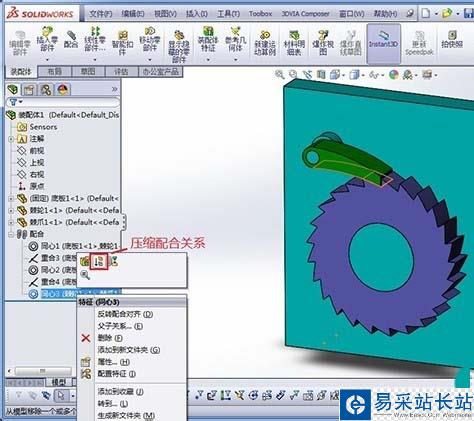
4、如下圖所示,將第三步設置的配合關系壓縮,釋放棘輪和棘爪的旋轉自由度,為運動仿真做準備。
二、運動仿真
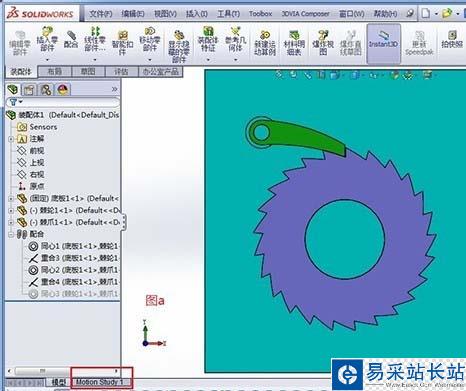
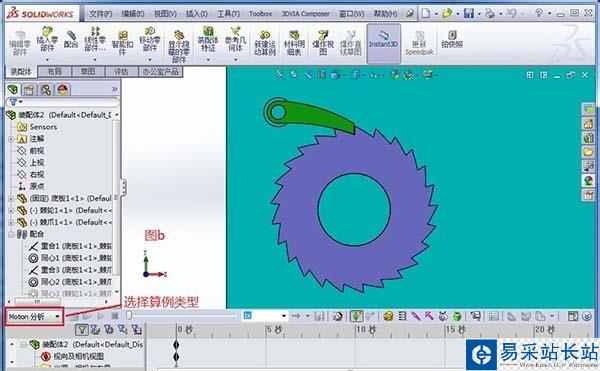
1、在已經開啟SolidWorks Motion插件的情況下,如下圖a所示點擊“Motion Study1”。在“算例類型”一欄選擇“Motion分析”,如下圖b所示:
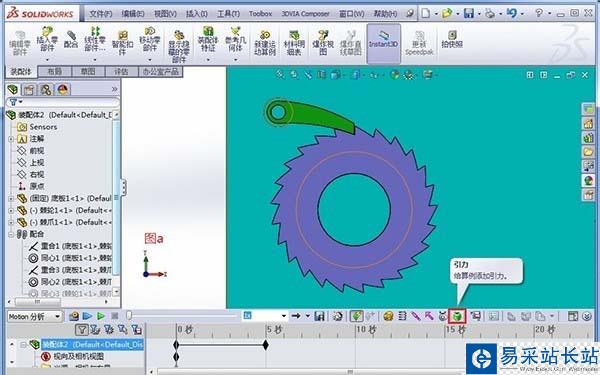
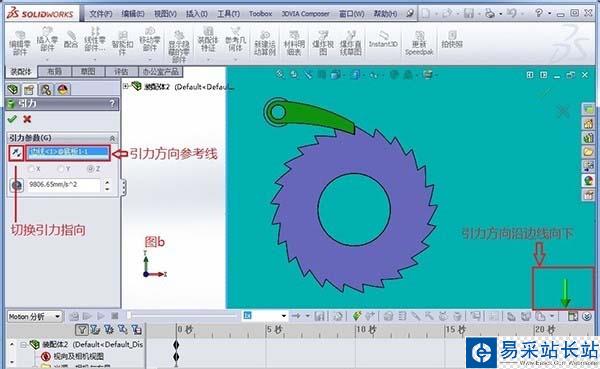
2、點擊如下圖a所示的青蘋果圖標,為裝配環境添加引力;如下圖b所示,將底板的一條豎直邊線設置成引力方向的參考線,將引力方向切換到豎直向下。
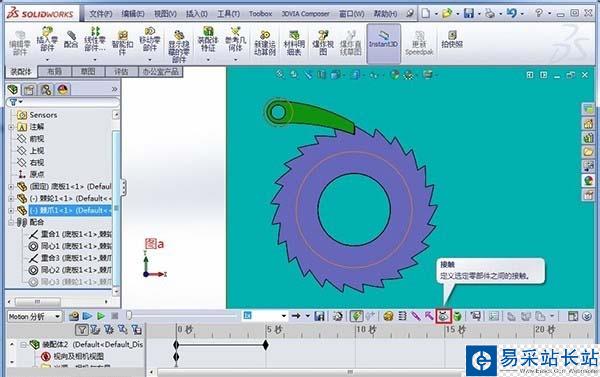
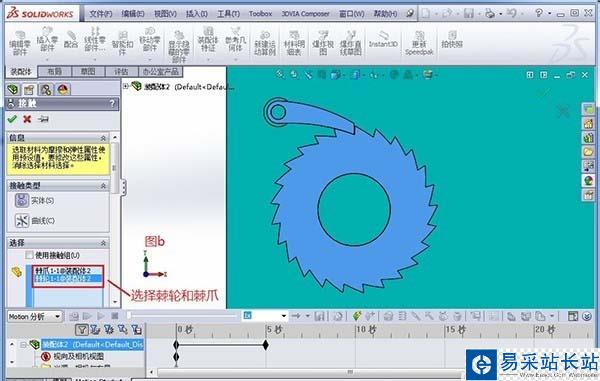
3、點擊如下圖a所示的凸輪圖標,在棘輪與棘爪之間設置接觸關系;如下圖b所示,選中棘輪和棘爪,點擊確定即可。
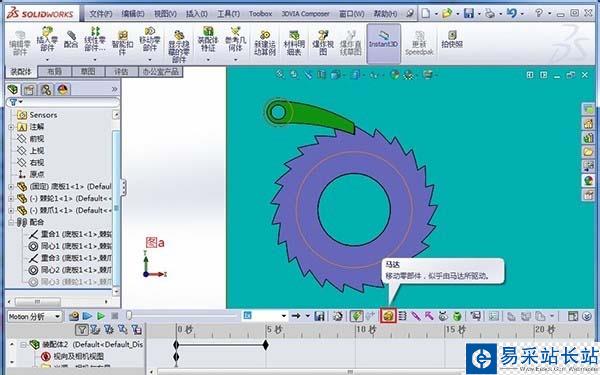
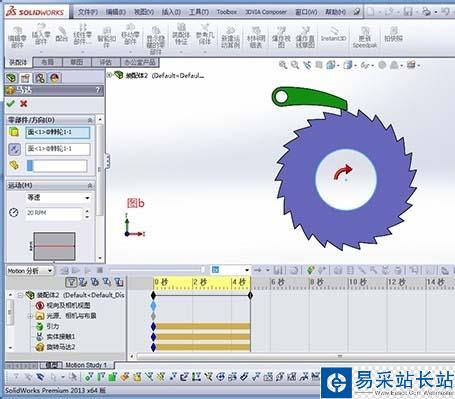
4、點擊如下圖a所示的電機圖標,在棘輪上放置一個旋轉馬達;如下圖b所示,旋轉馬達放置在棘輪上并且按順時針方向旋轉,轉速最好設置得小一點。
5、將底板隱藏,方便觀察棘輪與棘爪的相對運動,然后替換“視向及相機位置”的初始鍵碼,以讓系統記住底板的隱藏操作。
新聞熱點




疑難解答