安川機(jī)器人伺服驅(qū)動(dòng)的定義和構(gòu)成要素

伺服的定義
正確的伺服構(gòu)成以及伺服機(jī)械原理都是優(yōu)良自動(dòng)控制的一部分。目標(biāo)值的任意變化構(gòu)成了控制系統(tǒng)。
伺服的構(gòu)成要素
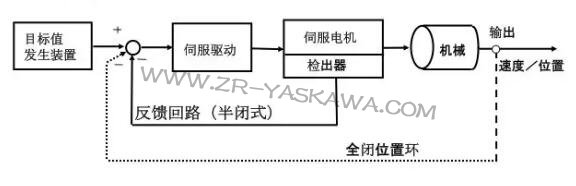
伺服的構(gòu)成
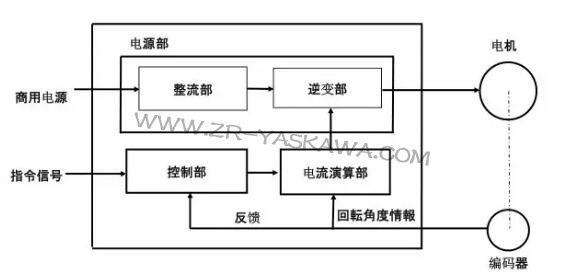
編碼器的作用
①檢測(cè)電氣角度(或磁極)
為了使電機(jī)均勻地連續(xù)旋轉(zhuǎn),需要檢測(cè)轉(zhuǎn)子的電氣轉(zhuǎn)動(dòng)角度,通入該位置所需的電流,其作用是檢測(cè)該位置。
②檢測(cè)負(fù)載位置和速度
作用是檢測(cè)反饋控制(伺服本質(zhì))必不可少的位置、速度。
控制部的構(gòu)成
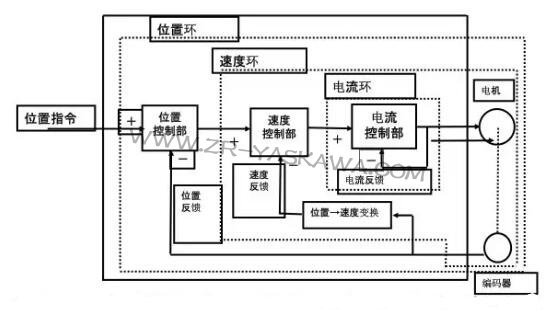
環(huán)路是由位置控制部、速度控制部、電流控制部發(fā)出的指合→控制部→輸出→指令反饋所形成的閉合回路。
電流回路在伺服器內(nèi)閉合,位置回路、速度回路向伺服驅(qū)動(dòng)外輸出。
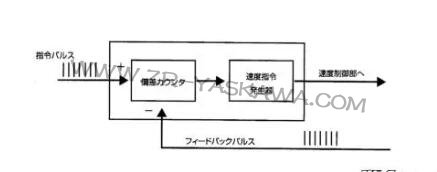
位置控制部的構(gòu)成
·數(shù)字伺服的位置決定指合輸入信號(hào)是脈沖列。
位置決定量是脈沖數(shù),位置決定速度是單位時(shí)間(秒)的脈沖量。
(PPS:Pulse/Second)
·輸人的脈沖量與反饋的脈沖數(shù)量相一致時(shí),這才完成了位置決定這一構(gòu)成。
·在位置控制部中,因?yàn)橛休斎朊}沖的加算、反饋脈沖的減算,所以有一個(gè)計(jì)數(shù)器。
(也稱幅差計(jì)數(shù)器)
速度控制部的構(gòu)成
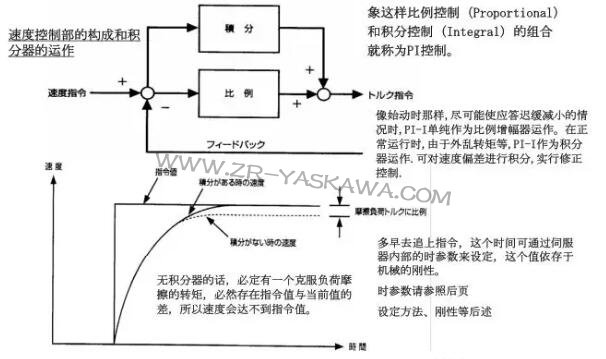
比例勤作(P助作)
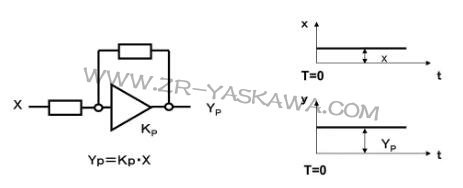
·將增益調(diào)整到一個(gè)相當(dāng)?shù)牧繒r(shí),比例動(dòng)作增強(qiáng),應(yīng)答速度變慢。
·輸入偏差為0時(shí),有連續(xù)的運(yùn)作。
精分勤作(I勤作)
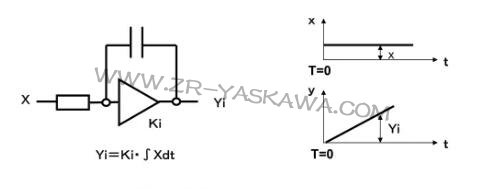
·幅差變小、負(fù)荷動(dòng)作越困難
鎘差微量存在,這個(gè)量就稱為殘留偏差(偏移)。
·即使是小幅差,也可以積累成大的操作量。直到幅差成為0,負(fù)荷才可以運(yùn)作。
比例精分勤作(P-I勤作)
·P動(dòng)作與I動(dòng)作并用。
·Tr越短,動(dòng)作表現(xiàn)越強(qiáng)。
伺服的性能評(píng)價(jià)
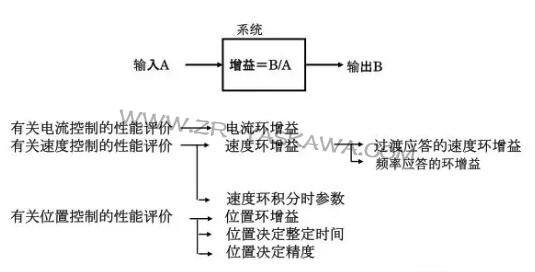
評(píng)價(jià)伺服的應(yīng)答性(指合輸入后輸出的情況(電機(jī)如何轉(zhuǎn)動(dòng)),使用回路增益這個(gè)用語(yǔ)。就是GAIN,獲得和利益的意思。是輸人和輸出之比所解釋的技術(shù)術(shù)語(yǔ),現(xiàn)在直接使用增益來(lái)表示。

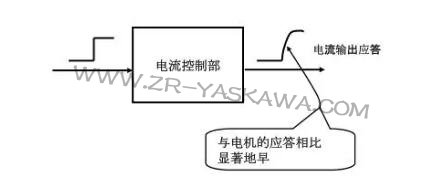
有關(guān)電流控制的性能評(píng)價(jià)
所謂電流控制的回路增益,就是由電流控制部輸入電流指合,電流是
怎樣流動(dòng)的應(yīng)答性。
售是,這個(gè)應(yīng)答性是不依存機(jī)械而存在的,回路在伺服內(nèi)部,并這個(gè)應(yīng)答性可以充分地高,因此不能與機(jī)械相調(diào)整。
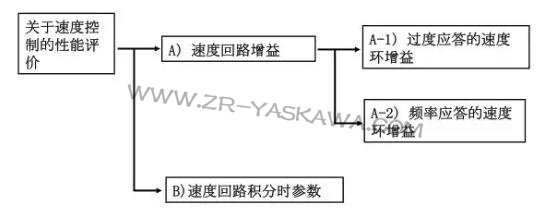
有關(guān)速度控制的性能評(píng)價(jià)
速度環(huán)增益和速度環(huán)積分時(shí)參數(shù)影響速度控制的性能。
速度環(huán)增益中又包括過(guò)度應(yīng)答的速度環(huán)增益和頻率應(yīng)答的速度環(huán)增益。