安川機器人遠程控制總結
一、 master程序
1、master程序的設置
單擊【主菜單】—>選擇屏幕上的【程序內容】—>【新建程序】
單擊【選擇】顯示如圖1-2所示的界面,單擊【選擇】,輸入程序名,單擊軟鍵盤【ENTER】,單擊【執行】,此處程序名為“MASTER”,程序創建完畢。
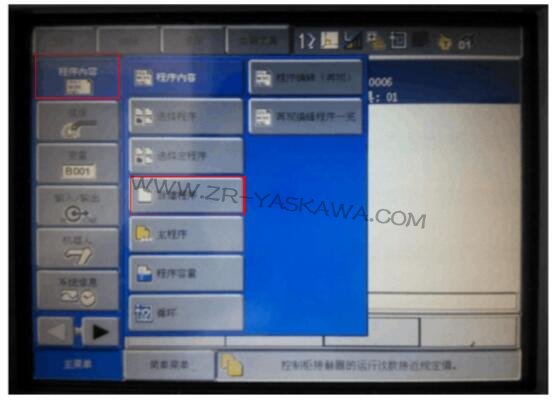
單擊【主菜單】—>選擇屏幕上的【程序內容】—>【主程序】
單擊【選擇】,設置主程序界面。
單擊【選擇】,單擊【向下】選擇“設置主程序”。
單擊【向下】選擇“MASTER”單擊【選擇】。
2、MASTER程序的編輯
單擊【主菜單】—>選擇【程序內容】—>【選擇程序】—>【選擇】,出現如圖1-7所示的界面,單擊【向下】,選擇“MSATER”,單擊【選擇】。在如圖2-1所示的界面下編輯主程序。
此處以2個工位,每個工位3種工件的工作站為例創建主程序內容,需要熟悉機器人示教器的基本操作(如【命令一覽】【插入】【回車】【選擇】)。
插入DOUT OT#(1) OFF程序舉例:光標定位在左側行號處,如圖2-2,如圖單擊【命令一覽】,選擇【I/O】,單擊【選擇】,選擇【DOUT】,如圖2-3所示的界面
單擊【選擇】,顯示如圖2-4所示的界面,光標定位在“DOUT”上,單擊【選擇】,顯示如圖2-5所示的界面,光標定位到“數據”行的ON,單擊【選擇】,切換成“OFF”,單擊兩次【回車】則可出入該指令。需要指出的是在光標定位處插入指令是向下插入。
程序內容如下(安裝在機器人中的MASTER程序見附件MASTER): 第二行的NAME才是機器人控制器登錄的程序名,單純的修改文件名不能改變程序名。
圖2-5 程序內容如下(安裝在機器人中的MASTER程序見附件MASTER): 第二行的NAME才是機器人控制器登錄的程序名,單純的修改文件名不能改變程序名
'=初始化
'=初始化
'=主程序
'***工位1判斷
'***工位2判斷
'***無工位被選中
JUMP *MAIN '=主程序
'=工位1工件選擇程序
'***把IGH#(1)的4位賦給
'***當 B000=1跳到*JOB1-1標簽
'***當 B000=2跳到*JOB1-2標簽
'***當 B000=3跳到*JOB1-3標簽
'***當無工件被選中,暫停
JUMP *MAIN '=工位1工件選擇程序
'=工位2工件選擇程序
'***把IGH#(1)的4位賦給
'***當 B000=1跳到*JOB2-1標簽
'***當 B000=2跳到*JOB2-2標簽
'***當 B000=3跳到*JOB2-3標簽
'***當無工件被選中,暫停
'=工位2工件選擇程序
'=工位1的1#工件焊接調用
JUMP *MAIN '=工位1的1#工件焊接調用
'=工位1的2#工件焊接調用
'=工位1的2#工件焊接調用
'=工位1的3#工件焊接調用
'=工位1的3#工件焊接調用
'=工位2的1#工件焊接調用
'=工位2的1#工件焊接調用
'=工位2的2#工件焊接調用
'=工位2的2#工件焊接調用
'=工位2的3#工件焊接調用
'=工位2的3#工件焊接調用